Conception
Shared Sensors is a project for Berkeley's EE106a Introduction to Robotics course for Fall 2018. Shared Sensors was made around the idea of having multiple robots with specialized functions to get a single job done. Having specialized robots allows for a more efficient use of materials and power for some situations like search and rescue, and surgery robots. Both of these situations could have one larger robot command multiple smaller robots to get a job done. For example, for search and rescue, one large robot can have access to a large amount of power and computational hardware and command many small robots with a limited amount of computational power and sensors to go through the ruble and relay its data back to the larger robot.
Introduction
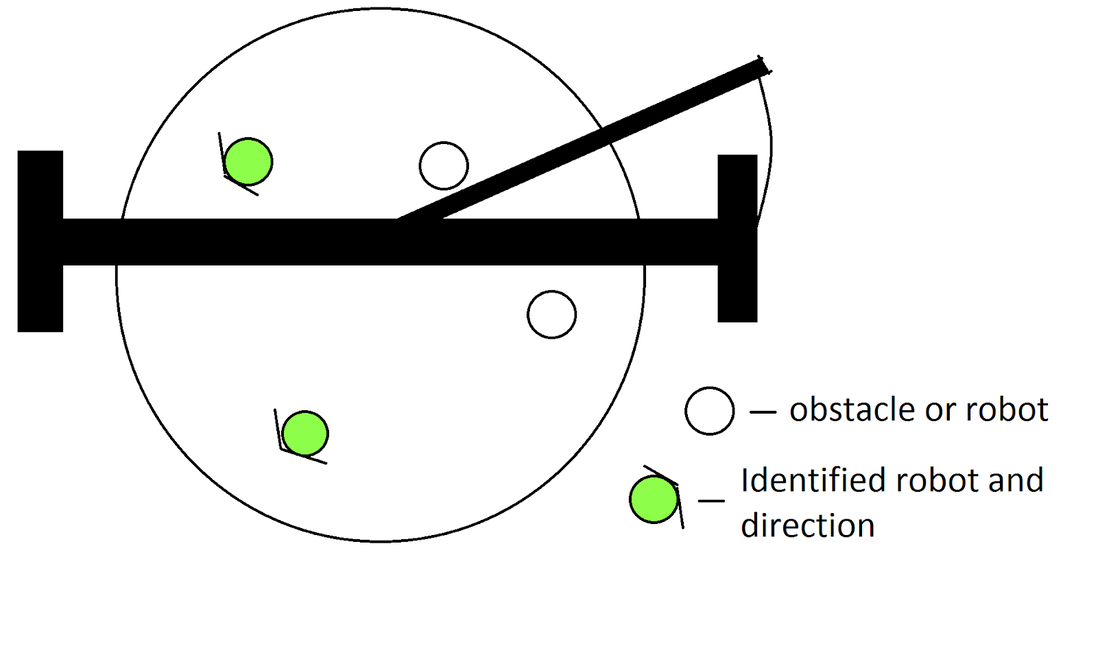
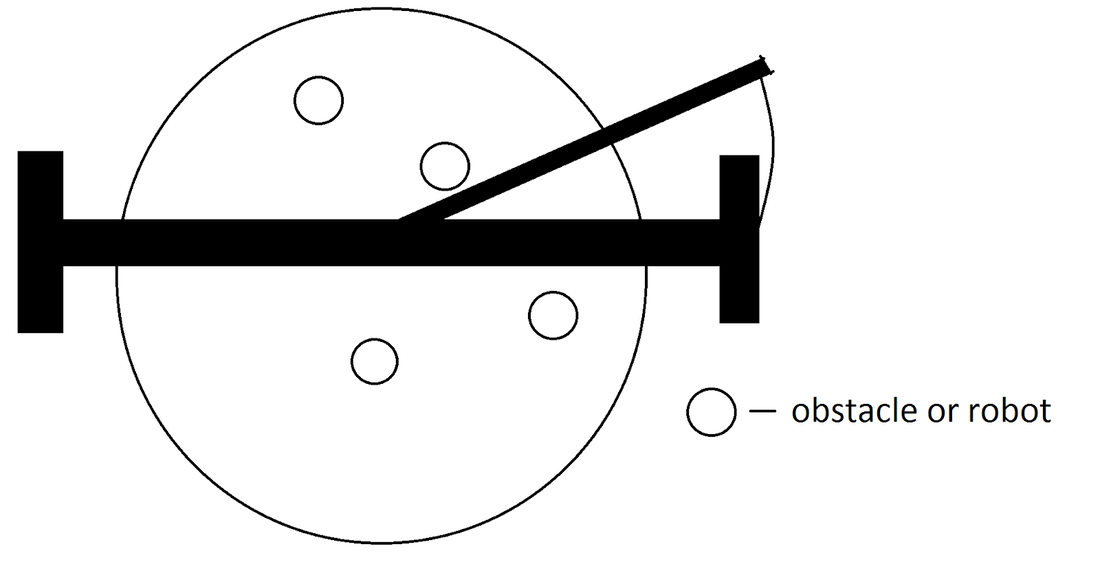
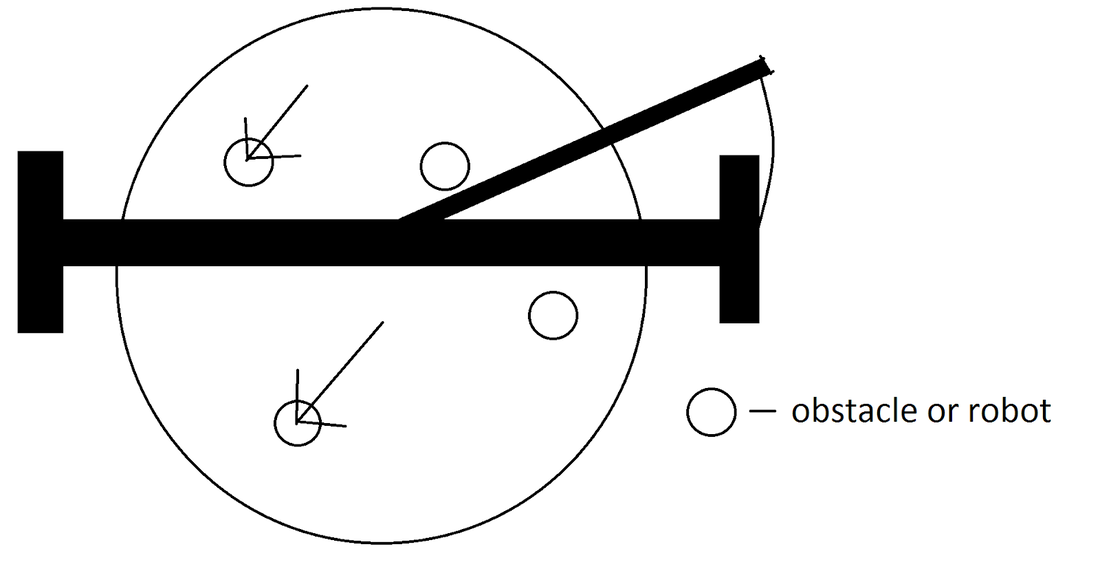
Shared Sensors operates with one large robot controlling smaller sensor limited robots. The large robot uses an ultrasonic sensor on a long arm and swivels around a metal frame and practically scans a circular area under the metal frame. The smaller robots use wheels and motors with encoders but have no access to any other sensors. Before the first scan of the large robot, several small robots and obstacles are placed under the large robot to be scanned with the large robot's ultrasonic sensor. After the first scan the large robot knows the locations of the small robots and the obstacles(Phase 1), but doesn't know the difference between what is a obstacle or small robot. Then, each of the small robots moves a different distance forward(Phase 2), and the large robot makes another scan. After this second scan, the large robot can compute where the obstacles and small robots are, and even the directions of the small robots(Phase 3). With all the locations of the obstacles and small robots known, the small robots can do some action with the obstacles, such as move in circles around the obstacles. The original goals for the project was to have 2 obstacles and 2 small robots.
Phase 1
Phase 2
Phase 3