Scanning Robot
|
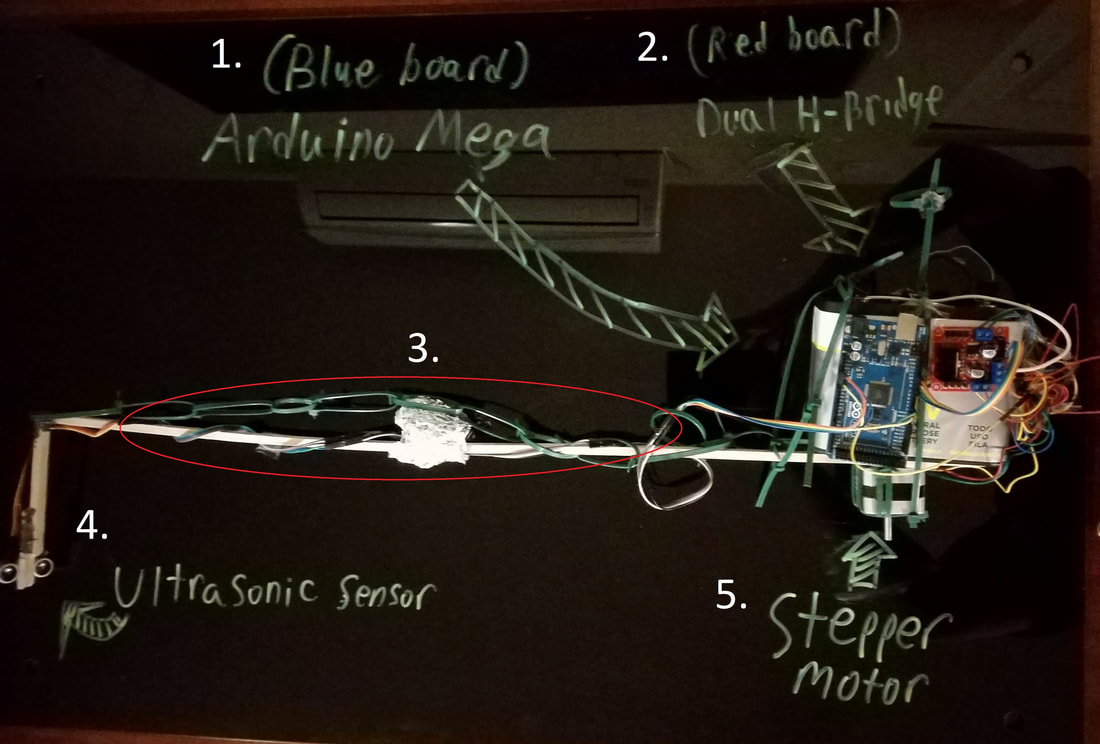
1. Arduino Mega
Used for the processing and control for the framed robot. It operates at 16MHZ and has a lot of memory compared to other common Arduinos(256KB Flash, 8KB SRAM). The projected needed the largest SRAM possible to hold the biggest 2-Dimensional array to hold the locations of the objects with the lowest tolerance possible. Which happened to be a 35x35 array of Short data type allowing for a tolerance of 2.8 centimeters. |

|
|
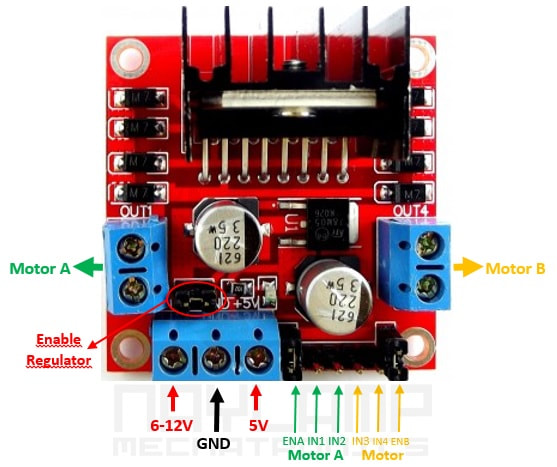
2. TimeSetl L298N Dual H Bridge
Used to control the stepper motor in the framed robot. It allows the stepper motor to move one step at a time and has a large heat sink for extended use. This used received its input from the Arduino board and is powered by a 12V battery. |
|
|
3. Arm Materials
The arm is made from balsa wood so minimize the weight and rotational inertia which minimizes the wiggling the arm does after each movement of the stepper motor. Because of the weakness of the balsa wood and longer arm, the ultrasonic sensor at the end of the arm droops quite a lot. To combat this, a foil ball and zip ties are used to mimic a cable stayed bridge. Foil was used because its easy to get, its light, and moldable. Zip ties were used to because they can be quickly be adjusted or replaced. |

|
|
4. Ultrasonic Sensor
Ultrasonic sensor uses sound to ascertain the distance of the closest object. It is fairly robust. When the ultrasonic sensor gives a bad number it usually large so a simple if statement allows for effective filtering. The ultrasonic sensor is fastened to the end of the arm using velcro so it can be adjusted at any time. |

|
|
5. Sparkfun Stepper Motor
This is a bipolor stepper motor with 200 steps per revolution. Using a stepper motor allows for knowing the precise angle of the framed robot from when it started scanning, since the stepper motor moves one step at a time(1.8 degrees). A stepper motor also provides a large torque for a small electric motor(2.3kg*cm holding torque). |

|
|
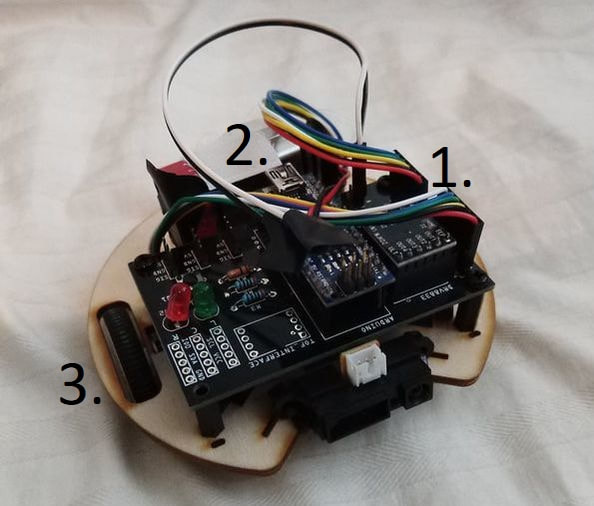
1. Sn754410NE Motor Driver
A motor driver that uses 2 PWM inputs from the Arduino to control the power to both of the motors allowing for each motor to be controlled independently. The specific amount of power sent to each motor is controlled by multiple PID. |

|
|
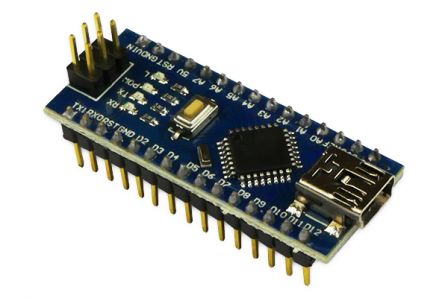
2. Arduino Nano ATmega328P
This controls the small robot. It gets data from the motors encoders using the Arduino interrupt ports. This allows the Arduino to keep track of the velocity and distance each of the wheels has gone. |
|
|
3. 6V 500RPM Motor with Encoders
Brushed geared electric motors that are powered by the motor driver. The speed of each motor is controlled with two PIDs, one to keep the robot straight and one to keep the robot at a desired speed. |

|
